
|
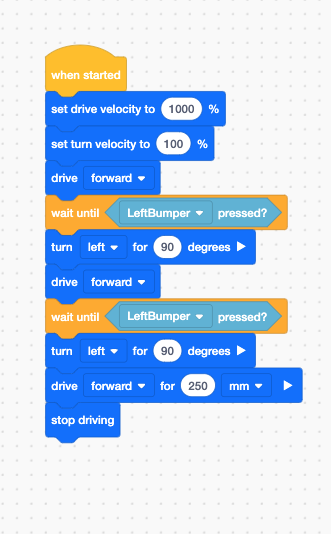
Summary:The first challenge for this unit was getting to A. In this unit I learned how to make the robot do see-think-act, I did that by the block called "wait until", by that block the robot was able to sense the wall in front of him and turn left when he sensed the wall.
| ||

|
Summary:In this lessons I had to get to the number 2 and 3. I did this by using the wait unit block, by using that I was able to turn many times with less command blocks.
| ||
|
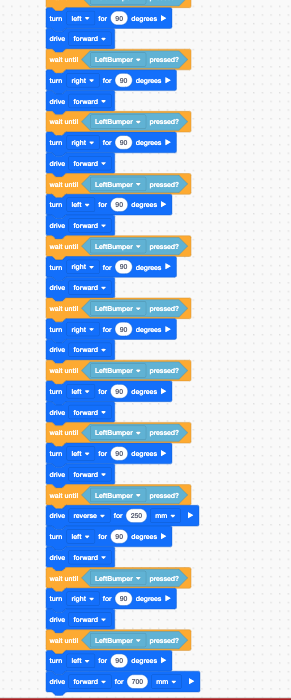
Summary:In this last lessons I had to give many commands to the robot. First I had to go the number 4 and then finish line. In this final lesson I used everything I learned and put it in this lessons. It had to made many turns before getting to the finish line. In this unit I learned how to use bumper sensor functions.
| ||
